智能小车驱动器软件与人工智能基础软件开发全攻略
开发智能小车的驱动器软件并融合人工智能基础功能,是一个从硬件交互到智能决策的综合性工程。它既是嵌入式系统开发的经典实践,也是探索人工智能落地的绝佳起点。本文将系统性地阐述其开发流程、关键技术以及如何引入AI能力。
第一部分:智能小车驱动器软件开发
驱动器软件是智能小车的“神经系统”,负责与底层硬件(电机、传感器)直接对话,实现精准控制。
- 硬件抽象与驱动层:
- 电机控制:这是核心。首先需要编写电机驱动器(如L298N、TB6612等芯片)的驱动代码。通常使用微控制器(如STM32、Arduino或树莓派)的PWM(脉宽调制)模块来控制电机的速度和方向。代码需要提供如
Motor<em>SetSpeed(motor</em>id, speed, direction)等基础接口。
- 传感器集成:为各类传感器编写驱动。例如:
- 超声波/红外测距:提供
GetDistance()函数。
- 编码器:提供
GetEncoderCount()以测量轮子实际转速,实现闭环控制。
- IMU(惯性测量单元):提供姿态角(偏航角、俯仰角)数据。
- 通信接口:实现UART、I2C、SPI等总线通信协议,确保与传感器和控制器的稳定数据交换。
- 运动控制层:
- 在驱动层之上,构建更高级的运动模型。例如,建立小车的运动学模型,将抽象指令(如“以速度V前进”、“旋转角度θ”)转换为左右轮的目标速度。
- 实现闭环控制算法(如PID控制器),根据编码器反馈的实际速度动态调整PWM占空比,使小车能抵抗负载变化,实现匀速、精准的直线行驶和转弯。
- 中间件与协议层:
- 为了与上层(如AI决策模块)通信,需要定义清晰的通信协议(如基于串口的自定义协议,或更高级的ROS话题/服务)。
- 这一层将底层的硬件细节封装起来,向上提供统一的API,例如
move<em>forward(distance),rotate(angle),get</em>sensor_data()等。
第二部分:人工智能基础软件的引入与集成
在稳定的驱动器软件基础上,我们可以为小车注入“智能”。
- 环境感知与数据融合:
- 这是AI应用的数据基础。将来自多路传感器(超声波、红外、摄像头、激光雷达等)的原始数据进行融合处理。
- 例如,使用卡尔曼滤波或互补滤波融合IMU和编码器数据,得到更精确的位置和姿态估计(即状态估计)。
- 如果使用摄像头,则需要运行轻量级的计算机视觉算法(如OpenCV)进行车道线识别、交通标志检测或目标跟踪。
- 决策与规划算法:
- 基于规则的决策:最简单的AI,例如“遇到障碍物距离小于30cm则右转”。
- 路径规划算法:实现如A*、Dijkstra等全局规划算法,或动态窗口法(DWA)、时间弹性带(TEB)等局部避障与轨迹规划算法,让小车能自主规划从A点到B点的安全路径。
- 机器学习/深度学习模型的部署与推理:
- 模型训练:在PC端,使用PyTorch、TensorFlow等框架训练AI模型。例如:
- 训练一个卷积神经网络(CNN)进行图像分类或目标检测,让小车识别特定物体。
- 训练一个强化学习(RL)模型(如DQN、PPO),让小车通过试错学会避障、寻路等复杂技能。
- 模型轻量化与部署:将训练好的模型进行量化、剪枝,转换为适合嵌入式设备(如树莓派、Jetson Nano)运行的格式(如TFLite, ONNX Runtime,或使用NCNN、MNN等推理框架)。
- 边缘推理:在车载计算单元上运行优化后的模型,根据实时传感器输入(如图像)产生控制指令(如方向盘转角、油门值),并下发给驱动器软件执行。
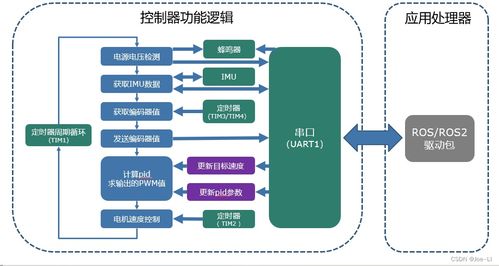
- 软件架构设计:
- 推荐采用模块化和分层设计。一个典型的架构是:
- 硬件驱动层(直接控制硬件)
- 运动控制层(PID控制,运动学解算)
- 感知融合层(传感器数据处理与融合)
- AI决策层(规划算法、模型推理)
- 人机交互/通信层(接收遥控指令或向上位机发送数据)
- 考虑使用机器人操作系统(ROS/ROS2)作为框架。ROS提供了节点通信、消息传递、工具包等强大支持,能极大简化传感器驱动、算法模块的集成与调试过程。
第三部分:开发流程与建议
- 迭代开发:先让小车“动起来”(基础驱动),再让它“走直线”(闭环控制),然后“感知环境”(传感器融合),最后“自主决策”(AI算法)。
- 仿真优先:在将复杂AI算法部署到实物前,使用Gazebo、CoppeliaSim等仿真环境与ROS结合进行大量测试,可以大幅提高效率、降低成本并保证安全。
- 资源考量:嵌入式资源有限,需在算法复杂度、实时性与功耗之间取得平衡。AI模型的选择和优化至关重要。
- 安全与容错:必须设计软件看门狗、紧急停止机制和故障诊断功能,防止AI决策错误导致硬件损坏或安全事故。
###
开发智能小车的驱动器软件与AI系统,是一个融合了嵌入式开发、自动控制、传感器技术和人工智能的跨学科项目。从精准的底层PWM控制到高层的深度神经网络推理,每一层都环环相扣。遵循从下至上、由实到虚、仿真验证的开发路径,并善用ROS等成熟框架,你将能成功打造出一台真正“智能”的移动机器人,并在此过程中深刻理解人工智能在物理世界落地的完整链条。
如若转载,请注明出处:http://www.zkkiss.com/product/60.html
更新时间:2026-05-30 23:27:18